Visual Footprint
Use this feature to compute the visual footprint of 3D assets, providing a 2D representation of their spatial extent for efficient rendering and analysis in the Pixyz SDK.
Read time 2 minutesLast updated 8 months ago
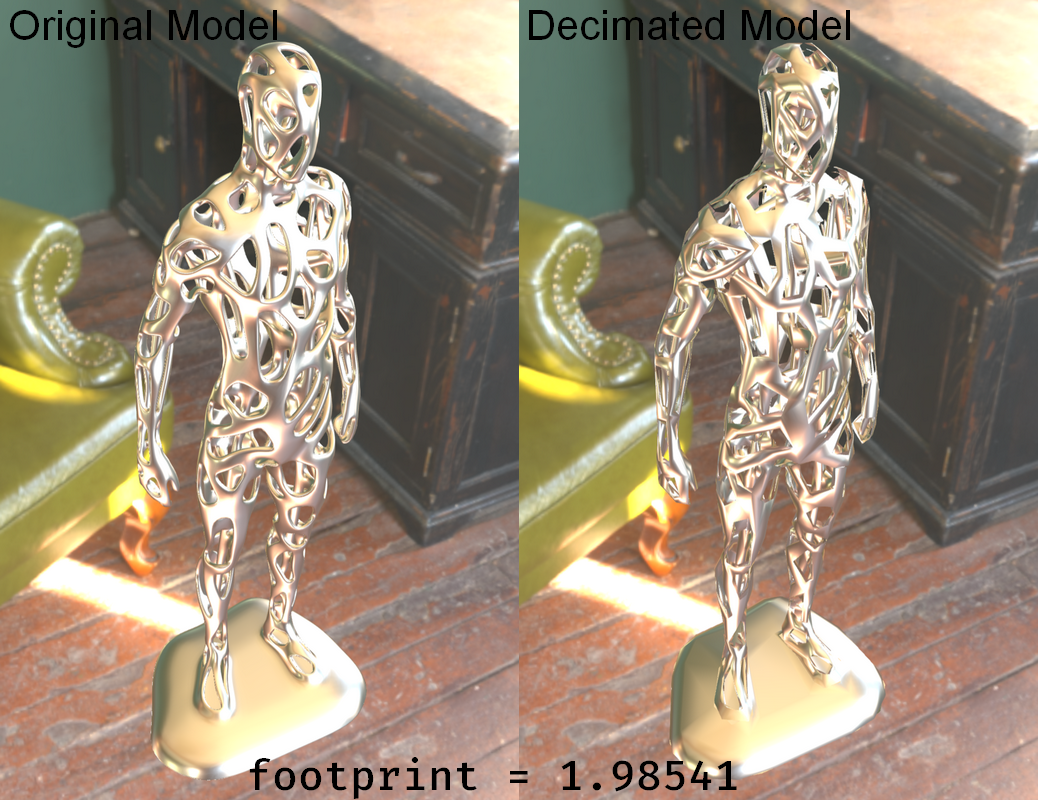
API function: algo.getVisualComparisonFootprint This function is used in order to compare the visual difference between two sets of occurrences. The result is in millimeters, in the world space.

nb_viewpointsresolution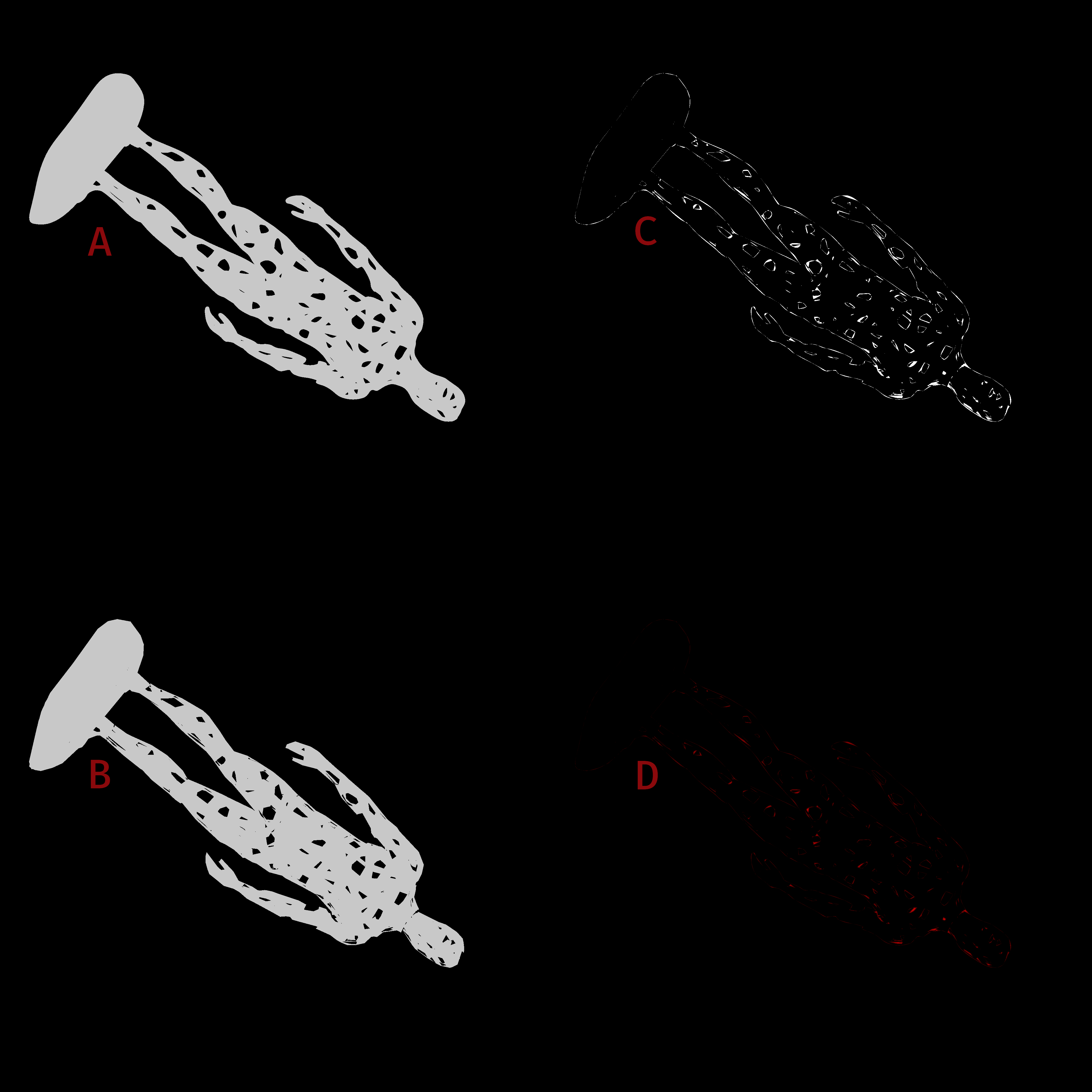
ABCD
createHLODChainUsingVisualFootprint.pyimport pxzdef create_hlod_chain(files: list[str], resolution: int = 512, nb_viewpoints: int = 256) -> int: """Creates a chain of hlods given an list of files to import. Parameters ---------- files : list[str] The files to import. The first in the list is the "original" file. The others are low-quality version of it. The order of the LODs doesn't matter, they will be ordered in the HLOD chain based on their resemblance with the original model. resolution: int Size of the viewer to compute the footprint. nb_viewpoints: int Numbers of points generated around the bounding sphere of the scene to compute the footprints. Returns ------- int The occurrence representing the root of the created hlods chain. """ print(f"Creating a HLOD chain of {len(files)} files:") print(" - Importing files... ", end="") occurrences = [] for filename in files: occurrences.append(pxz.io.importScene(filename)) print("Done") print(" - Computing footprints... ", end="") footprints = [0] for occ in occurrences[1:]: # Visual comparison between the first occurrence, which is the real model, and the current lod of the loop footprints.append(pxz.algo.getVisualComparisonFootprint([occurrences[0]], [occ], resolution, nb_viewpoints)) print("Done") # Sorting occurrences by footprints footprints, occurrences = zip(*sorted(zip(footprints, occurrences))) # Creating HLOD chain hlods = [] for i in range(len(files)): hlod = pxz.scene.createOccurrence(f"HLOD {i:03}") pxz.scene.setParent(occurrences[i], hlod) cmp_hlod = pxz.scene.addComponent(hlod, pxz.scene.ComponentType.HLODComponent) pxz.core.setProperty(cmp_hlod, "Error", str(footprints[i])) hlods.append(hlod) for i in range(len(files) - 1): pxz.scene.setParent(hlods[i], hlods[i + 1]) print("Chain creation is done!") return hlods[-1]files = [ "path_to_original_model.pxz", "path_to_heavily_decimated_version_of_it.obj", "path_to_slightly_decimated_version_of_it.glb", "path_to_more_decimated_version_of_it.fbx", # ... "path_to_impostor_version_of_it",]hlod_chain = create_hlod_chain(files)pxz.scene.setParent(hlod_chain, pxz.scene.getRoot())